






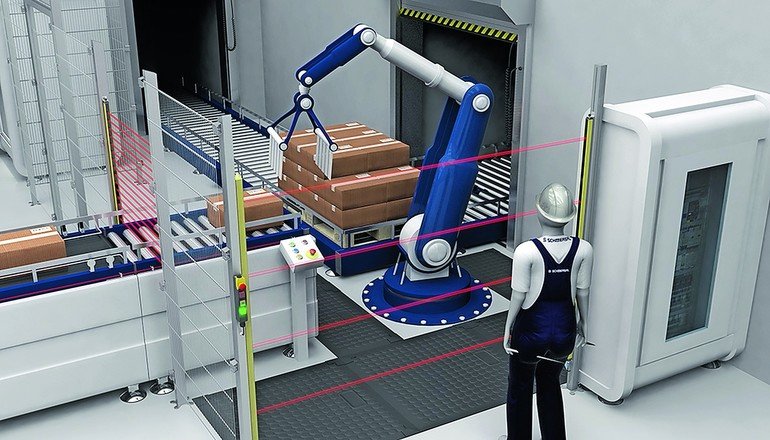
Um Unfallrisiken zu vermeiden, arbeiten die allermeisten industriellen Roboter hinter starren Schutzeinrichtungen. Das Institut für Sicherheitsforschung der Hochschule Bonn-Rhein-Sieg forscht schon seit Jahren an der Zukunftstechnologie „Kollaborierende Roboter“, die ein barrierefreies und dennoch hochsicheres kooperatives Arbeiten zwischen Mensch und Maschine bald möglich machen soll. Gerade startet das neue Projekt

 SifaPlus-Beiträge und das große Archiv erhalten!
SifaPlus-Beiträge und das große Archiv erhalten!Unsere Webinar-Empfehlung
29.02.24 | 10:00 Uhr | Spielsucht, Kaufsucht, Arbeitssucht, Mediensucht – was genau verbirgt sich hinter diesen Begriffen? Wie erkennt man stoffungebundene Süchte? Welche Rolle spielt die Führungskraft bei der Erkennung, Vermeidung und Bewältigung von Suchtproblemen am Arbeitsplatz?…
Teilen:






{kind=link}