






In Smart Factories funktioniert der Warenfluss vollautomatisiert. Das heißt: Material für die Produktion wird in vorbereiteten Containern auf Bereitstellungsflächen zur Verfügung gestellt, auch „Supermarkt“ genannt. Materialbedarfsmeldungen erfolgen digital direkt aus dem Produktionsbereich. Für die Versorgung der Roboterzellen mit den benötigten Teilen und für die Abholung der bearbeiteten Komponenten kommen fahrerlose Transportsysteme (FTS) zum Einsatz.
Die automatisierten Abläufe an diesen Übergabestationen, an denen FTS mit Roboterzellen interagieren, müssen gefahrlos und zugleich effizient gestaltet werden. Das gelingt nur mit zuverlässigen Sicherheitslösungen: FTS passieren die Gefahrbereiche, ohne dass die Roboterzellen ihre Arbeit unterbrechen, und Personen dürfen zu keinem Zeitpunkt unbemerkt in diese Areale gelangen. Ein neues Sicherheitskonzept basiert auf einer dynamischen Schutzfeldanpassung rund um das FTS bei der Materialübergabe.
Systeme arbeiten zusammen
Für die automatisierte Materialübergabe zwischen FTS und Roboter braucht es eine ganzheitliche Betrachtung der Sicherheitsfunktionen an den Übergabestationen. Relevant sind in diesem Zusammenhang die Einfahrt des FTS in die Station, das Erreichen der Übergabeposition sowie die Ausfahrt. Die FTS selbst sind zwar durch ihre integrierten Sensoren gesichert – beispielsweise über Sicherheits-Laserscanner.
Und die Roboterzellen wiederum erkennen per Sensorik, ob sich eine Person dem gefährlichen Arbeitsbereich nähert. Doch für eine automatisierte Materialübergabe zwischen FTS und Roboter gilt: Die unterschiedlichen Steuerungseinheiten der am Prozess beteiligten Systeme (Roboterzelle, FTS und Materialflusssteuerung) müssen miteinander kommunizieren können.
Dabei sind sie so aufeinander abzustimmen, dass Sicherheit und Zuverlässigkeit über den gesamten Zyklus hinweg gewährleistet sind. Das gelingt nur über eine enge Abstimmung mit den beteiligten Fachabteilungen. Außer den (Werks-)Planern, Logistikverantwortlichen und Arbeitssicherheitsbeauftragten trägt auch die IT-Abteilung in dieser Phase einen wesentlichen Teil zum Erfolg bei.
Anforderungen an Übergaben
Traditionelle Ansätze arbeiten vielfach mit Lichtvorhängen, um den Zugang zum Übergabebereich zwischen FTS und Roboterzelle abzusichern. Das ist zwar technisch machbar, in den Möglichkeiten jedoch begrenzt: Die Anwesenheit von Personen innerhalb des Übergabebereichs lässt sich nicht automatisiert überwachen.
Um Personen vom Gefahrenbereich zu trennen, sind bei diesen klassischen Konzepten weitere Schutzvorkehrungen erforderlich – etwa mechanisch trennende Elemente wie Zäune oder Gitter. Effizienter ist eine vollautomatisierte, sichere Übergabe zwischen FTS und Roboterzellen ohne physische Barrieren. Zwischen Personen und FTS muss das System jedoch zuverlässig unterscheiden können. Insgesamt gelten für diesen Ansatz folgende Anforderungen:
- Der Gefahrenbereich der FTS-Übergabestation muss während des gesamten Prozesses abgesichert sein.
- Festgelegte FTS sollen den Arbeitsbereich axial (optional auch radial) vollautomatisch befahren und verlassen können.
- Personen beziehungsweise Abweichungen von der festgelegten FTS-Kontur müssen jederzeit erkannt werden und ein Stopp-Signal auslösen.
FTS von Schutzfeldern umschlossen
Die von Leuze entwickelte Lösung zur Sicherung von Übergabestationen Roboter/FTS gewährleistet zwei Sicherheitsfunktionen:
- Stoppen der gefährlichen Bewegung der Roboterzelle
- Dynamische Anpassung von Sicherheitsfeldern rund um das FTS
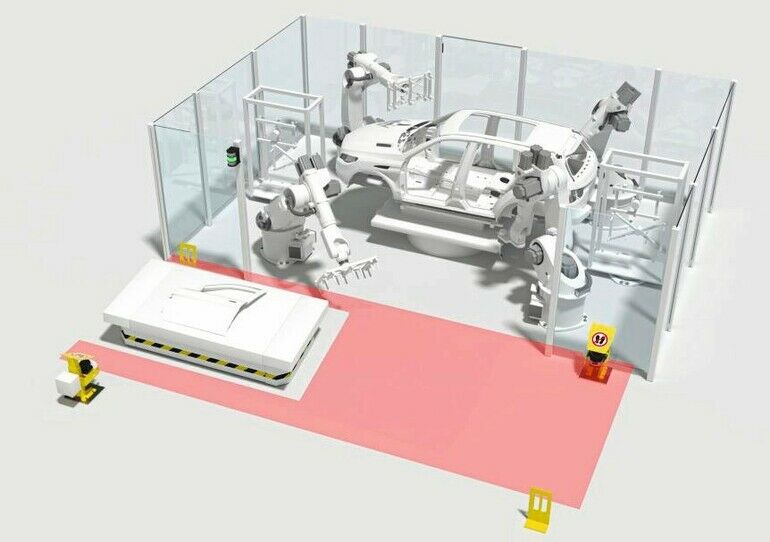
Um den gesamten Bereich der Übergabestation abzusichern, werden Sicherheits-Laserscanner eingesetzt. Diese erkennen über Schutzfelder den Zugang und die Anwesenheit von Personen im Übergabebereich. Ist das der Fall, löst das System ein Stoppsignal aus.
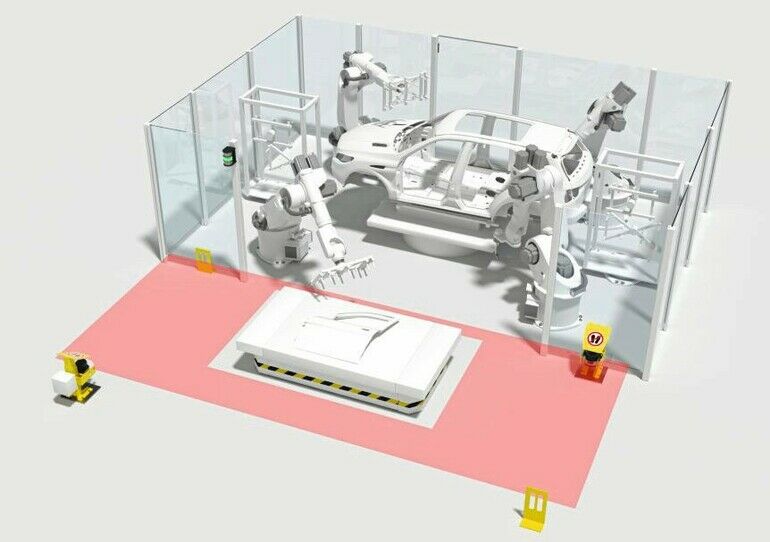
Parallel wird die Position des FTS im Überwachungsbereich jederzeit erkannt. Damit das FTS selbst kein Stoppsignal auslöst, blendet das Sicherheitsprogramm dessen Umriss aus dem gesicherten Bereich aus. Das Schutzfeld passt sich also dynamisch um das sich bewegende FTS an.
Dazu schalten die Laserscanner ihre vorkonfigurierten Schutzfelder schrittweise um. Das von Schutzfeldern „umschlossene“ FTS kann dadurch automatisiert in die Station einfahren, an der Parkposition das Material übergeben und anschließend die Station wieder verlassen. Das Sicherheitsniveau bleibt während des gesamten Zyklus erhalten.
Vorteil: Die restliche Umgebung wird über das verbleibende Schutzfeld jederzeit abgedeckt – das bietet einen Rundumschutz. Grundsätzlich ist es nur den im System vorab festgelegten FTS-Konturen möglich, das Schutzfeld zu passieren. Um Manipulationen oder Scanner-Dejustage zu erkennen, werden die im Gerät integrierte Wasserwaagen-Funktion und zusätzlich externe Referenzkonturen genutzt.
Grafiken: © Leuze
Axiale oder radiale Einfahrt
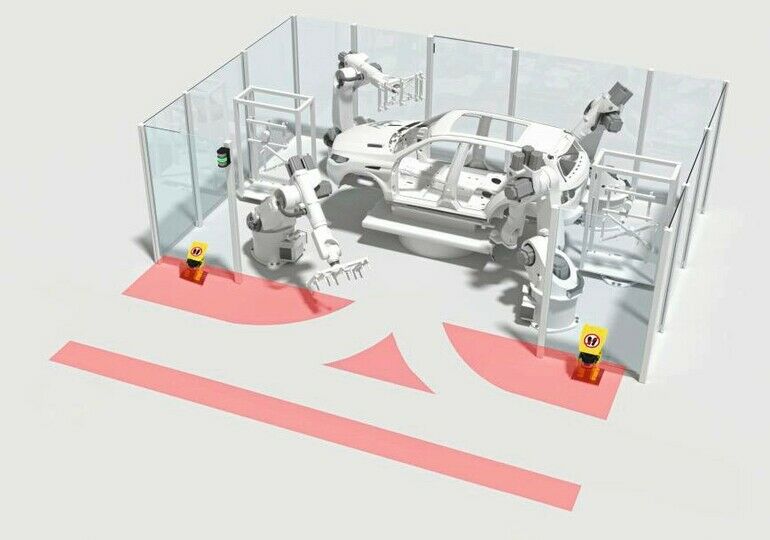
Zu den Komponenten für dieses Lösungskonzept gehören zwei Sicherheits-Laserscanner, ein Sicherheitsprogramm sowie die Systemsteuerung. Die optimale Positionierung der Laserscanner in der Applikation hängt von unterschiedlichen Faktoren ab. Zu berücksichtigen sind:
- Applikations-Layout und eventuell konstruktive Abschattungen
- FTS-Spezifikationen (beispielsweise Dimensionen)
- Ein- und Ausfahrtpositionen der FTS in den Schutzfeldbereich
- Fahrwege und Geschwindigkeit der FTS im Schutzfeld (axial/radial)
Abhängig davon bietet sich vorzugsweise eine diagonale oder lineare Positionierung der Laserscanner um das Schutzfeld herum an. In besonderen Fällen (etwa über Eck-Layouts mit Abschattungen durch die Gebäude- oder Zellenstruktur) lässt sich der Systemverbund auch mit mehr als zwei Laserscannern betreiben.
Einfach umsetzbar
Für diese Art der Absicherung sind nur wenige Vorgaben zu beachten, beispielsweise die Mindestbreite des FTS als auch die maximale Fahrgeschwindigkeit im Schutzfeld. Außerdem sollte die Routengenauigkeit des FTS bei rund 50 Millimetern liegen. Zudem muss vor dem Gefährdungsbereich ausreichend Fläche vorhanden sein, um das FTS darin bewegen zu können und um ein ausreichend großes Scanner-Schutzfeld (erforderlicher Mindestabstand zur Gefährdung von allen Zugangsseiten) umsetzen zu können.
Um eine Ein- oder Durchfahrt des FTS einzuleiten, muss das FTS-Leitsystem der Materialflusssteuerung dessen Route zuvor an der Safety Solution anmelden. Je nach Risikobeurteilung der Applikation kann es erforderlich sein, ergänzend zum Stopp der Roboterzelle, auch das FTS bei einer Schutzfeldverletzung zu stoppen. Dies setzt eine sichere Kommunikation der Zelle mit dem FTS voraus.
Die Safety Solution arbeitet nach der Anmeldung des FTS durch das FTS-Leitsystem autark. Es gibt dabei keine Einschränkungen beim Teiletransport. Das Sicherheitssystem und die Schutzfelder orientieren sich am Umriss des FTS und nicht am darauf befindlichen transportierten Material. Selbst vorn oder seitlich überstehende Teile werden zuverlässig transportiert. Außerdem macht die Integration mechanische Absicherungen wie Zäune oder Gitter überflüssig. Das spart wertvollen Platz in der Produktion.
Von Risikobeurteilung bis Ergebnis
Wer für seine automatisierte Anlage dieses Konzept umsetzen will, benötigt im ersten Schritt eine Risikobeurteilung: Die Gefährdungen (etwa im Bereich des Roboters) müssen klar definiert sein. Ebenso muss bekannt sein, wie schnell die Roboterzelle stoppt. Auf dieser Basis lassen sich die Größe des Schutzfeldes sowie die zeitlichen Abläufe festlegen. Innovative Material-Logistik-Systeme sind daraufhin ohne Kompromisse umsetzbar.








{kind=link}